本日は走破性について自己満足にも語ってみることにします。けっこう初歩的な内容なんで興味ない人はスルーで。
今年はアレですね。去年までの「山があってないような物」的な考え方があったなかでのリング改定だったので、自由に走り回れない小型機が続出してましたね。
技術的に上れるかどうか....ってのもありますが、上る瞬間のモタツキでスキ取られて攻撃されるのもあって、自分から中央の山を登る小型機はかなり少なかったんじゃないかと。
ただ、最近練習試合とか見てると、やっぱり中央の山を制覇してるロボは強いですね。小型機は攻撃時に登る機会が少なくても、ヒット&アウェイで逃げて体勢整えるときに山登れると結構戦略広がります。上れないロボの方が多いんで、相手を置き去りにして逃げることが出来る事のメリットは大きい。最近練習してるとその辺を痛感する。
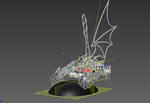
KING MANGOは横幅250ギリギリなので、リング中央の小山を超えるとき、跨いでもたつく動作が入ります。
絵を見て解る通り、外側の足が設置しているときに内側の足が地面に擦れてしまうんですよね。この所為で後ろに下がろうとする動力が働くのでモタツキます。
要は内側の足が擦れないようにすればいいわけですね。


考えられる解決方法2案のうち、簡単な方から説明。
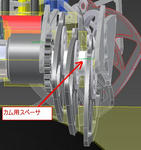
KING MANGOのカムヘッケン足は3mm7000系アルミ構成で剛性はかなり高い。また、Φ2の横ピン3本で動力を伝えているため、隣り合う足の間隔は調整が簡単、中間にはさむカム用スペーサの幅を変えるだけです。こいつを取っ払えば、隣り合うカムの間隔はゼロとなり、内側の足が山に擦れることはなくなります。そういう仕様で設計してるから。
でも今回は外せません。
図面には記載されていませんが、足先には3mm厚用の窓枠ゴムが採用されています。隣り合うゴムが干渉するのを避けるためにカムスペーサで幅を取っているためなんで、足の間隔が狭くなるとゴムが干渉してしまいます。
前作のMANGOでは足ゴムを東急ハンズのノンスリップゴム(薄型シールタイプ)を使用していたので干渉の問題は無かったけど、それだと高機動仕様では一試合中に寿命が持たないから、今は窓枠ゴムを採用。高機動型でないのであれば、ノンスリップゴムでも十分持つかと。
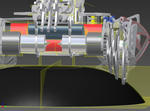
もう一つの解決策はカムの回転半径を大きくすること。
絵の現行機では回転半径10mmで設定されている為、接地してない内側の足は地面から20mmの高さを振り上げることになります。(厳密には位相によって変わるが。)
次回作では回転半径を15 or 20ぐらいに設定するつもり。20だったら足を40mm振り上げることになるから、まず擦れることは無いだろうと。.....とまぁ、その辺はサイズ的に搭載できるかどうかを今後の設計で要検討となりますが。
......とここまで小型機の走破性を語っていますが、たぶん次回作は転倒式中型機となる予定。なので語っている事全て搭載するかどうかはかなり怪しいところw
新型のイメージは大分固まっているので、その辺は図面が進んでから気が向いたら公開の方向で。
PR










