新年あけおめ。 ̄▽ ̄)ノシ MMですコンバンハ。
さて、昨年の無念を基に検討中の次期M@NGO、
非常に重要となってくるのが
全体のバランスなわけで、そんなバランス感覚を学ぶに当たり、
やはり足を持った生き物から学ぼうと考えたわけで....

ドラゴンデザイン継続もあり、恐竜モデルを
上野駅内の某科学系雑貨屋にて購入してきましたとさ。(¥980-)
いや、決して頭のデザイン参考にするために、うっかり4個セット買ってしまい、他3個が無駄といわれるのが嫌でこじつけている訳じゃないんだからねっ!全体のバランス見るんだからね!
まぁ、そうは言っても最大の特徴は顔なわけで、やはり顔から順番に見ていくことにしましょう。
まずはゴジラの背中っぽい飾りが特徴のステゴさん。
えーなんというか....(カッコ悪い.....っていうとステゴファンに怒られそうなので言いませんが).....顔ちっちゃいっすね。鳥顔っすね。しかも身体より下にありますね。地面に落ちてる餌拾って食ってたんでしょうか?
っていうかこの姿勢がデフォだと呑んだ餌が逆流しねえか?
餌に対してポジティブさを感じない為か、あまり積極的に生きようとしているようには見えません。
(実際は顎に歯があったので、草食ってたんでしょうね)
んまぁ、背中のゴジラ角を参考にしたくなったら見ることにしましょう。
ひき続き、トリケラトプスさん。

角2本が前突き出ていて、敵を倒すために生まれてきたかのような顔立ち。イイですね~♪
よく見ると目や鼻などの顔が前方に集まっており、角は頭の後ろから生えてるようなイメージ。後ろから生えているとバランスがとれるのでしょうか?
冠となる骨は、鳥等とは異なり首か生えているような位置関係になっている。うーん...こういうのはイメージに無かったなぁ。

首には背角っぽい凸が冠の付け根からずっとついている。
首を筋肉で支えやすくするためにこうなっているのでしょうか?
突進を武器にする為なのか、首が丈夫なんですねぇ。
また、肩甲骨が結構デカイです。身体部の1/3ぐらいの長さはあるんじゃないでしょうか?
それくらいのほうが見た目にもバランスがいい感じだ。足の付け根はロボでも丈夫にしないとね。
続いてウルトラさん。

言わずと知れた地上最大の首長竜。そんな子への最初の感想。
頭小せぇ。コイツ絶対に賢くない。(っていうか草食恐竜は全部ゆとりだ。)
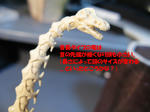
長い首に重い頭じゃぁ肩こってしょうがないですからね。首の長さに応じて頭って小さくなるんですね。
頭小さいと迫力なんてありませんよね。
つまり、首の長すぎる竜は迫力に欠けるということで。
デザイン決める上では、
「これくらいの頭にしたい!」
ってところから、自ずと首の長さは決まってくるのかもしれません。
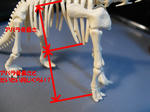
身体の大きさと足の長さってのは、同じくらいがバランスいい感じ。
ロボでは恐竜よりはトカゲスタイル(ティガレックス・スタイル)っぽくなるだろうけど、大きさのバランスとしては参考になるかも。
次回作が横長機体になったら、身体は縦にも横にも増やした方がバランスとれそうだ。
んで、最後は本命のティラノザウルス。
(ジュラシックパークではT-レックスって言ってたっけかな?どっちが正しいんだろうか。)



結局コレが一番近いスタイルになる予定なんだが、予想外な内容が多かったので収穫はアリということで。
今回4種の中で、唯一の「二足歩行する生き物」。
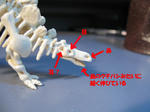
でもね、顔が前のめりになっていて、頭が重くなっていくのを支えられない構造になっているから、脳が大きくなる方向に進化するとは到底考えにくいのが欠点。つまり....
強そうな骨格してるけど、
「頭悪そう」なのはどうしようもないんでしょうかね?....と。
(まーだゴジラの方が頭イイですよきっと。)
ましてや実は目が横に付いているとか、ホントに獲物を狩ることが出来ていたのかが疑問な形。「死体だけを食い繋いで生きていた」といわれるのも無理は無いですね。
でもいいんですよ。ロボはトカゲスタイルなんで。ティガレックスもどきなんで。
あ....翼の骨格モデルないじゃん。
(......続く......かも)







